News.Welcome to our news page! Here, we will post weekly updates on our teams progress. You can also access and view the Engineering to Endure Twitter feed!
|
Weekly Updates:
Update 4/8:
Our competition yesterday didn't go exactly as planned. We were eliminated during our first round because we were unable to activate our bot. We were able to make repairs and return to the cage, defeating one opponent before being defeated a second time. At the end of the day, we won the best Engineering Documentation award. Team Cerberus also won Grand Champion, which means that we'll be travelling to Pennsylvania for Nationals.
Our competition yesterday didn't go exactly as planned. We were eliminated during our first round because we were unable to activate our bot. We were able to make repairs and return to the cage, defeating one opponent before being defeated a second time. At the end of the day, we won the best Engineering Documentation award. Team Cerberus also won Grand Champion, which means that we'll be travelling to Pennsylvania for Nationals.
Update 4/6:
With safety inspection this evening for the regional competition, our bot is ready to rumble. We have spent the week drive testing and setting up our gym for the competition (which we host). We have also been preparing more spare parts for the robot. We finally got an aluminum weapon motor mount made, but the specs were off for the manufacturer, so we choose to cast a mold of the part in-house so that we can use our weapon in combat. We are all super excited to do well in competition!
With safety inspection this evening for the regional competition, our bot is ready to rumble. We have spent the week drive testing and setting up our gym for the competition (which we host). We have also been preparing more spare parts for the robot. We finally got an aluminum weapon motor mount made, but the specs were off for the manufacturer, so we choose to cast a mold of the part in-house so that we can use our weapon in combat. We are all super excited to do well in competition!
|
Update 3/30:
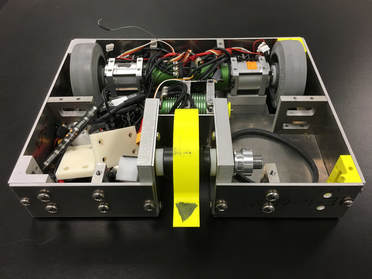
Big news this week: We finally have our weapon! Our vertical disk spinner has been milled out of S7 tool steel, and we put it on this week. To do this, we had to grind down our weapon shaft because it wouldn't quite fit in the hole on the spinner. Once we mounted the weapon, we took the weight of the bot: 14.9 pounds. We're nearly at the weight limit, but we still have a few parts to adjust/add. If we end up going over weight, we're planning to replace parts of our weapon motor brace with their 3D printed equivalent. From there, we'll look at replacing screws and plates. With only one week until competition, we're set to have a formidable bot. |
|
|
Update 3/23:
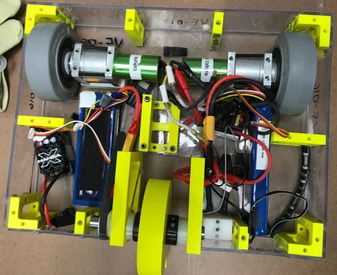
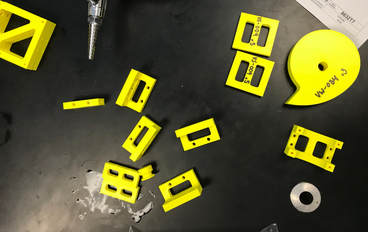
This week we had a drivable--and nearly complete--bot. We are missing only two parts: our weapon, and the base of our weapon motor mount (the yellow braces in the picture have since been replaced with their aluminum equivalents. These will hopefully be completed soon. Additionally, team Valkyrie and team Cerberus both presented at a job fair at Prairie Trail middle school, and Valkyrie was used as a demonstration. After the job fair, we encountered an issue with our left drive motor. Turns out, the speed controller was off. We remedied that issue, and were once again able to drive. |
|
Update 3/16:
Spring Break!
Throughout this week, we kept in contact with the manufacturer that is producing our weapon. It should hopefully be done soon, at which point we can complete our bot and do a spin-up test of the weapon.
Spring Break!
Throughout this week, we kept in contact with the manufacturer that is producing our weapon. It should hopefully be done soon, at which point we can complete our bot and do a spin-up test of the weapon.
|
Update 3/9:
All internal braces have now been attached to the robot. Our last corner braces (pictured) came in, so we just had to finish drilling and tapping the remaining holes. With our internal support structure complete, we can continue to focus on our electronics and our driving. |

|
|
Update 3/2:
As we have continued receiving parts from our manufacturing partners, we've continued making progress in the construction of our robot. We now have metal side braces (pictured), and have put them into our bot. We also continue to test our robot; powering up, driving, and adjusting our speed. Soon, we will have a complete, battle-ready bot! |

|
Update 2/23:
We had an extremely short week this week. We were only in school for one day due to inclement weather. Once we returned on Friday, we sent tool steel (for our weapons) to NCS, and metal for some of our miscellaneous parts to C&R. Next week, we'll continue to assemble our robot as we receive parts from our manufacturing partners.
We had an extremely short week this week. We were only in school for one day due to inclement weather. Once we returned on Friday, we sent tool steel (for our weapons) to NCS, and metal for some of our miscellaneous parts to C&R. Next week, we'll continue to assemble our robot as we receive parts from our manufacturing partners.
|
Update 2/16:
This week we put the metal that was cut last week onto our prototype. We also bought more metal to replace the parts that have been damaged. We did more soldering to strengthen the connections on our prototype's electronics, and we began the 3D printing of some new braces for our prototype. We had to do this because the print material was not strong enough for the metal and was breaking, so we remade the parts to increase the thickness to make a working prototype. We continue into the long weekend working on sending metal to manufacturers to get our metal cut. |

|
|
Update 2/9:
This week we finally started getting some metal cut. A few of us traveled to the Kansas City Kansas Community College with metal, so we have almost all of our plating completed. We need to have one of our plates redone, so that will require ordering more metal. We cleaned up the wiring in our bot, and now our prototype can drive upside down. Now we have to wait for skeleton pieces to come in so we can start putting together the final bot in time for competition. |

|
Update 2/2:
This week we finished a basic version of our 3D print/lexan prototype. We now have the power and electronics for our drive system functional, and our robot can drive, although we still need to fix some issues with wiring, and test invertabitity. We also began the process of sending part files to our manufacturing partners. We are having parts made at NCS, KCKCC, C&R, and UltraSource.
This week we finished a basic version of our 3D print/lexan prototype. We now have the power and electronics for our drive system functional, and our robot can drive, although we still need to fix some issues with wiring, and test invertabitity. We also began the process of sending part files to our manufacturing partners. We are having parts made at NCS, KCKCC, C&R, and UltraSource.
|
Update 1/26:
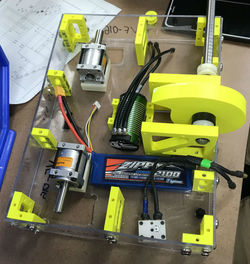
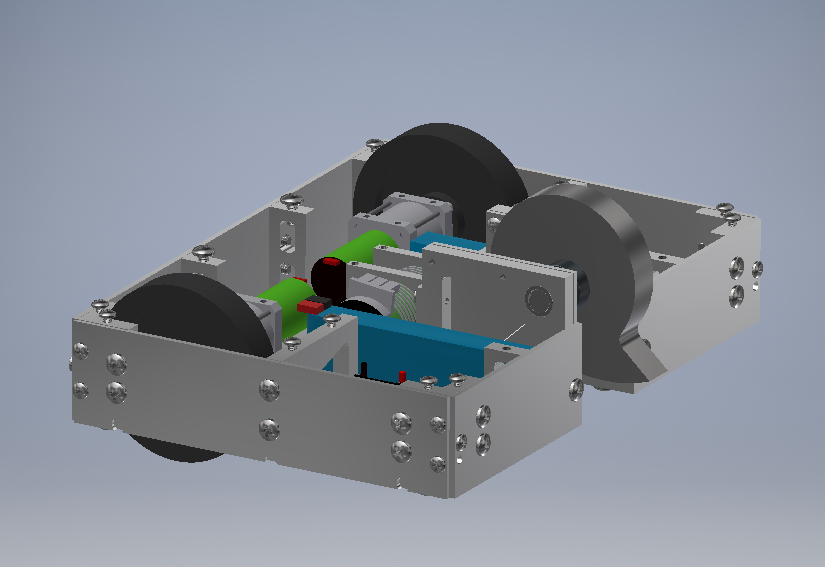
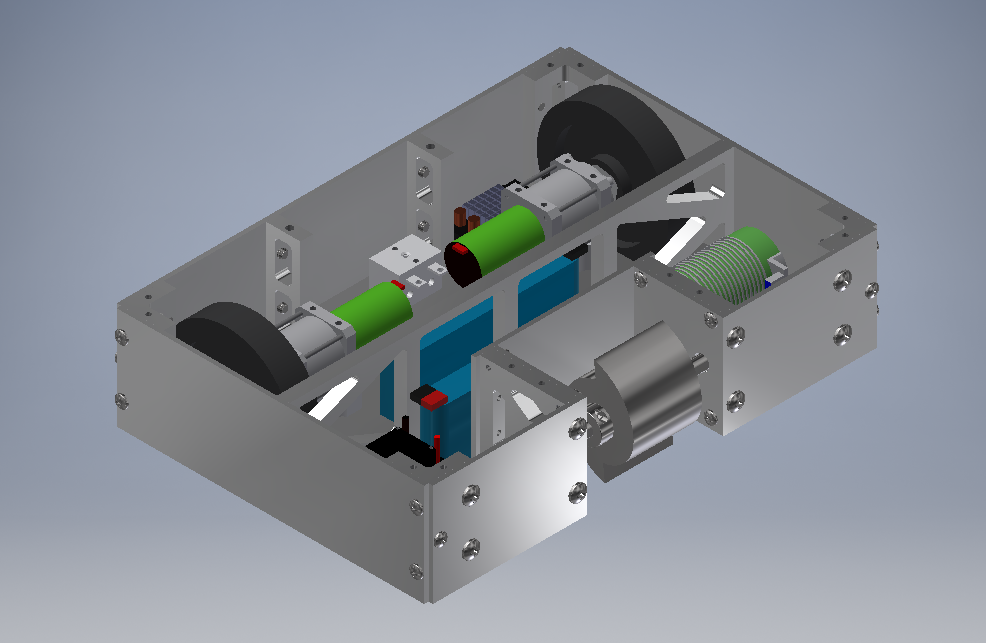
This week we continued to add electronics to our prototype. Our new wheels came in, and these will allow us to have better traction and pushing power. We ordered our motors and prepared our metal to be sent to the machine shops. We also brainstormed the possible configurations of our electronics inside the robot, one of which is pictured to the right. We also spun up our prototype weapon for the first time. |
|
|
Update 1/19:
This week we continued assembly of our prototype. Basic structural elements are in place, but we need to finish cutting and attaching our weapon shield and top plate. We have added our weapon, and are working to arrange and attach our electronics. We also received more metal shipments: our 3/8", 1/2", and 1/16". Finally, the three Engineering to Endure teams compiled a list of Castle Creations parts to be ordered. |
|
|
Update 1/12:
This week we constructed the frame of our next prototype. Using the 3D printed parts and Lexan plates, we have built a complete base and all of our walls. We still need to attach our electronics. Our 1/8" metal order arrived, and our parts are almost ready to be sent off to our manufacturing partners. |
|
|
Update 1/5:
This was a short two day week back from winter break. We reestablished team protocol and what we can do better this semester. Over the break we had many parts of our robot 3D printed, so we have begun construction of another prototype of our bot. |
|
Update 12/14:
This week we completed various logistical tasks. We tested some MambaX speed controllers that we found in last year's parts, and determined that (at least) one is fully functional (we need to finish soldering and testing the other). We also began creating a sheet metal order for our three teams, and made contact with NCS and UltraSource manufacturing. This will hopefully allow us to send our parts to be manufactured. We also finalized the CAD drawing for the bot, so we can begin to send pieces out to be created so we can build a competition ready bot. We are also currently prototyping a 3D print of our weapon. Today is our last day in class before winter break, so the CAD team is working hard to finalize the design so we can work on preparing parts for manufacturers over break. Unfortunately, we also had our 3D printed motor mounts break, so we're working on a redesign for those.
This week we completed various logistical tasks. We tested some MambaX speed controllers that we found in last year's parts, and determined that (at least) one is fully functional (we need to finish soldering and testing the other). We also began creating a sheet metal order for our three teams, and made contact with NCS and UltraSource manufacturing. This will hopefully allow us to send our parts to be manufactured. We also finalized the CAD drawing for the bot, so we can begin to send pieces out to be created so we can build a competition ready bot. We are also currently prototyping a 3D print of our weapon. Today is our last day in class before winter break, so the CAD team is working hard to finalize the design so we can work on preparing parts for manufacturers over break. Unfortunately, we also had our 3D printed motor mounts break, so we're working on a redesign for those.
Update 12/8:
This week we learned as a team how to tap holes in parts (tapping is how we make holes that we can put screws in). We also made updates to our robot design to make wider and shorter wheels to increase traction and to account for the shorter chassis. We made a large order for parts including screws and weapon belts for our bot, before we realized that the belts we ordered were not the size we needed, and are indeed too small. We are working hard to get more parts finalized so we can begin machining parts over winter break.
This week we learned as a team how to tap holes in parts (tapping is how we make holes that we can put screws in). We also made updates to our robot design to make wider and shorter wheels to increase traction and to account for the shorter chassis. We made a large order for parts including screws and weapon belts for our bot, before we realized that the belts we ordered were not the size we needed, and are indeed too small. We are working hard to get more parts finalized so we can begin machining parts over winter break.
|
Update 12/1:
This week we changed our weapon size and shape. We switched from a 2.5 inch wide weapon with two teeth and with a 1 inch reach to a .75 inch wide weapon that has one tooth and a 2.5 inch reach, which allows for a further reach with each hit. We also lowered our design from 3 inches to 2.25 inches, which also allowed us to put more weight into our weapon. We came out with a smaller and heavier hitting bot. We are still struggling to find manufacturing sponsors, but we are pursuing a couple of leads. We made our wiring much more efficient, and also began building a physical weapon prototype, as we 3D printed one of our weapon models and ordered the belts that we need. |
|
Update 11/24:
There were only two days of school this week (Happy Thanksgiving!). Despite this, we still made good progress. On Tuesday we took an organization picture for our school's yearbook. With the new weapon choice, Matt and Tyler are busy designing new parts for the structure of the prototype. We are also working on cleaning up our electronics, and re-soldering some of our motors and kill switches.
There were only two days of school this week (Happy Thanksgiving!). Despite this, we still made good progress. On Tuesday we took an organization picture for our school's yearbook. With the new weapon choice, Matt and Tyler are busy designing new parts for the structure of the prototype. We are also working on cleaning up our electronics, and re-soldering some of our motors and kill switches.
|
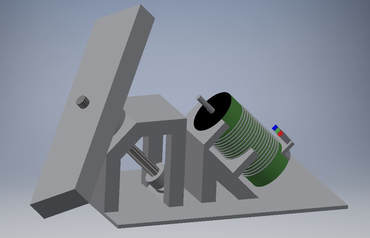
Update 11/17:
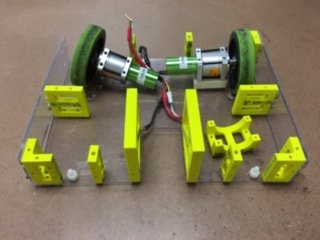
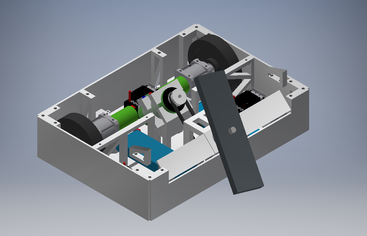
This week we had our pictures taken by one of our photography students. We also participated in the Engineering Academy Open House on Tuesday, November 14th. We had a great time interacting with the kids that came, letting them drive through an obstacle course with our robots to get an idea of what they can do in Engineering to Endure. As for the design of our robot, we found that the weight of the diagonal design would be over the 15 lb. weight limit. After having a group discussion, we agreed that a drum spinner design for the weapon would be the most ideal. Mostly because it would easily be within the weight limit. Also, it was the second most favored design of the group. An early version of our new weapon is shown. |
|
|
Update 11/10:
This week we prepared for Engineering Academy's open house. We added extra supports to the test bot to strengthen the chassis and turned the motor speed down to make driving more manageable for the young engineers at the Open House. In AutoCAD, we made lots of progress on our design for a chassis and integration of our drive and weapon systems. We also, as a team, learned about universal drill bit sizing and tapping procedure. |
|
|
Update 11/3:
This week we added racing strips to our prototype! Its looks amazing and is pictured here. We also redid our wiring inside the robot to make it much less cluttered and easier to work around. However, we did have to take apart most of the bot, because during a drive test one of our kill switches got torn apart, as well as one of our speed controllers. We did get these fixed, but it was time consuming. |
|
|
Update 10/27:
This week we made a tentative decision for our weapon this year. We decided that the diagonal spinner will be the most challenging and effective weapon to build and use. We are excited to work through the design challenges involved with an angled spinner, such as how to mount the weapon the the bot, as well as how to transfer energy from the motor. We have been doing lots of driving practice with one of our prototypes and, have added a top plate to it so can be flipped and still move. |
|
Update 10/20:
This week was a short week for us due to parent-teacher conferences. David and TJ created a list of criteria for our chassis/frame, and we'll start a priority list and a decision matrix soon. As a team, we reviewed the three possible weapon designs and created a poll to decide which weapon to use. TJ also came in after school to correct the speed controllers, drive the bot, and test the battery life.
This week was a short week for us due to parent-teacher conferences. David and TJ created a list of criteria for our chassis/frame, and we'll start a priority list and a decision matrix soon. As a team, we reviewed the three possible weapon designs and created a poll to decide which weapon to use. TJ also came in after school to correct the speed controllers, drive the bot, and test the battery life.
|
Update 10/13:
This week, our wheels (pictured here) and gearboxes came in, so we got to test those with the motors we have. The wheels provided more traction, giving us more control and allowing the bot to accelerate faster. Some of our juniors narrowed down our weapon choices to a top 3. We choose a vertical drum spinner, a horizontal spinner, and a diagonal spinner (the juniors REALLY like spinners). This allowed us to create CAD models of these three designs, in order to facilitate prototyping. We are in the process of deciding between the three right now. Pictures of the CAD models are posted in the media tab of this website. |

|
|
Update 10/6:
This week, we did nothing. At least it felt like it. We made some new design choices on our robot, so we had to order new motors, speed controllers, and gearboxes (pictured here), basically our entire drive system. We ordered them last week, and can't progress in our prototyping until we receive them. In the meantime, the team has begun the design process for our weapon system. We have brainstormed different types of weapons, and have determined some constraints, including weight, size, and cost. We can only go so far without a drive system however. |

|
Update 9/29:
This week, we started building a second prototype bot, but we weren't able to finish it, because we ordered new motors and speed controllers from Castle Creations, and we can't do anything else with the drive system until we have them. We also decided to try a new type of wheels, as we are currently having problems with traction. Additionally, our school's Engineering to Endure hosted the BotsKC kickoff on 9/16. BotsKC is our regional organizer, who runs the regional competition, and helps us communicate with the national organization. TJ and Tyler went teach new teams about robotic basics, and gave an overview of how we've progressed thus far in the season. TJ also showed off our prototype bot to demonstrate the work we've done.
This week, we started building a second prototype bot, but we weren't able to finish it, because we ordered new motors and speed controllers from Castle Creations, and we can't do anything else with the drive system until we have them. We also decided to try a new type of wheels, as we are currently having problems with traction. Additionally, our school's Engineering to Endure hosted the BotsKC kickoff on 9/16. BotsKC is our regional organizer, who runs the regional competition, and helps us communicate with the national organization. TJ and Tyler went teach new teams about robotic basics, and gave an overview of how we've progressed thus far in the season. TJ also showed off our prototype bot to demonstrate the work we've done.
|
Update 9/15:
This week, we added scuba weights (pictured here) to our robot to run the motors under load; the slots on scuba weights make them easy to attach. This brought the robot's total weight to around 16 pounds. We then proceeded to test the weighted prototype. The robot moved much slower (as one may expect), and the wheels took longer to gain traction (all of the weight was mounted in front, away from the wheels). Once the robot got up to speed, it moved in a Tokyo Drift-type style. The motors were set to a tank drive system, allowing for quicker, lower-radius turns. We also completed problem framing for the drive system. |

|
